

研究自动化机械手臂的基本理论
- 壹点网
- 2021-03-18 16:04:30
研究自动化机械手臂的基本理论
直交机械手臂由于其结构简单,定位精准,价格低廉,因而在自动化设备中应用及其广泛。而这个设计的简易自动组装机器人是一台自动化程度较高的机器人,这个机器人由行走模块、主控模块和机械手臂组成。包装机械自动化水平日益提高,为了实现各种复杂的包装,利用机器人手臂模拟人手的运动已日益迫切。
自动化机械手臂的优点
产品量大、自动化程度高,自动化机械手及自动生产线工艺种类多样化。工业产品为人民日常生活所必需,因而要求成批大量生产,也就必然要求广泛采用半自动化、自动化的机械手,随之自动生产线的应用也日益广泛。工业自动化机械手往往具有动作复杂、机构运动速度高、涉及学科领域广、更新换代快等特点。节约人工、减轻工人的工作劳动力:用机械手取出产品,可节省人工,如配合输送带同时使用,则一名操作工人可以轻松的操作2-3台注塑机。而且解决了操作大吨位注塑机时工人操作特别劳累的问题,排除了因为劳累引发的安全隐患及产品降低等一系列问题。这些不都是机械臂的优傲吗?
自动化机械手臂的准确性
自动化机械手臂是机器人技术领域中实际应用最广泛的自动化机械装置,它们可以有不同种形态,但它们都有一个共同的特点,就是能够接受指令,并精确地定位到三维(或二维)空间上的某一点进行作业。一台自动化机械手臂拥有灵活的机器“手臂”,并能够有节奏地来回移动,仿佛长了眼睛一般精准高效地抓取物体。这也是机械手臂的优傲之一。
根据这些资料来看,自动化机械手臂是比较好使用的一款机器人了,大大的加快了工厂的效率。
免责声明:市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。
















相关推荐

阿坝红原机场即将迎来重新起飞 其中成都飞稻城往返天天有航班
成都日报 2021/03/17
英国撤销CGTN在英国广播许可 并称将对CGTN采取处罚措施
参考消息 2021/03/16
广西宜州多名学生感染诺如病毒 区委、区政府已组成工作组进行调查
新华视点 2021/03/10
国家统计局发布2021年1月份70个大中城市商品住宅销售价格变动情况
中国网财经 2021/03/02男子跨年晚会中奖半头猪 网友:新年不用买肉了
北晚新视觉综合 2021/02/08热门资讯 日 周 总
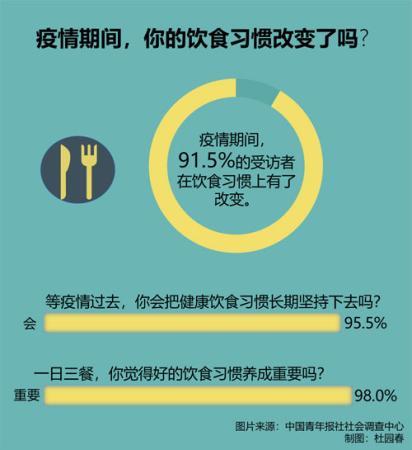
疫情期间,你在饮食上养成了新习惯吗?
中国青年报 2020/08/20
鱼蒙眼如何治疗?想了解的可以进来看下
爱宠网 2020/07/07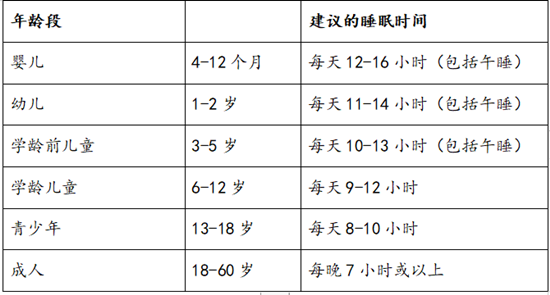
人需要多少睡眠?如何改善睡眠习惯?
人民网-科普中国 2020/06/09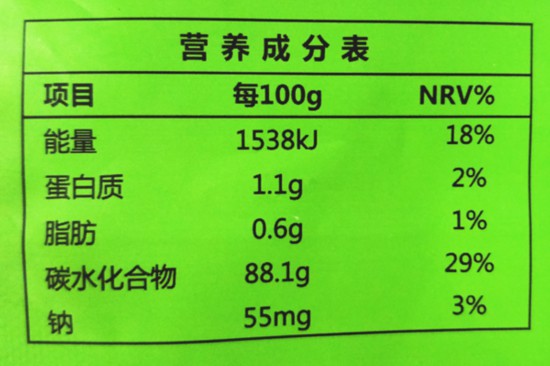
营养成分表你能看懂吗?来听听专家解析吧
新华网 2020/05/29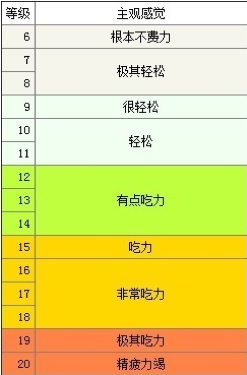
为什么高强度运动后免疫力会短暂降低?如何运动才健康?
人民网-科普中国 2020/04/02
涉嫌默许售假12家二手交易平台被约谈 二手平台别成“假劣货集市”
广州日报 2021/02/18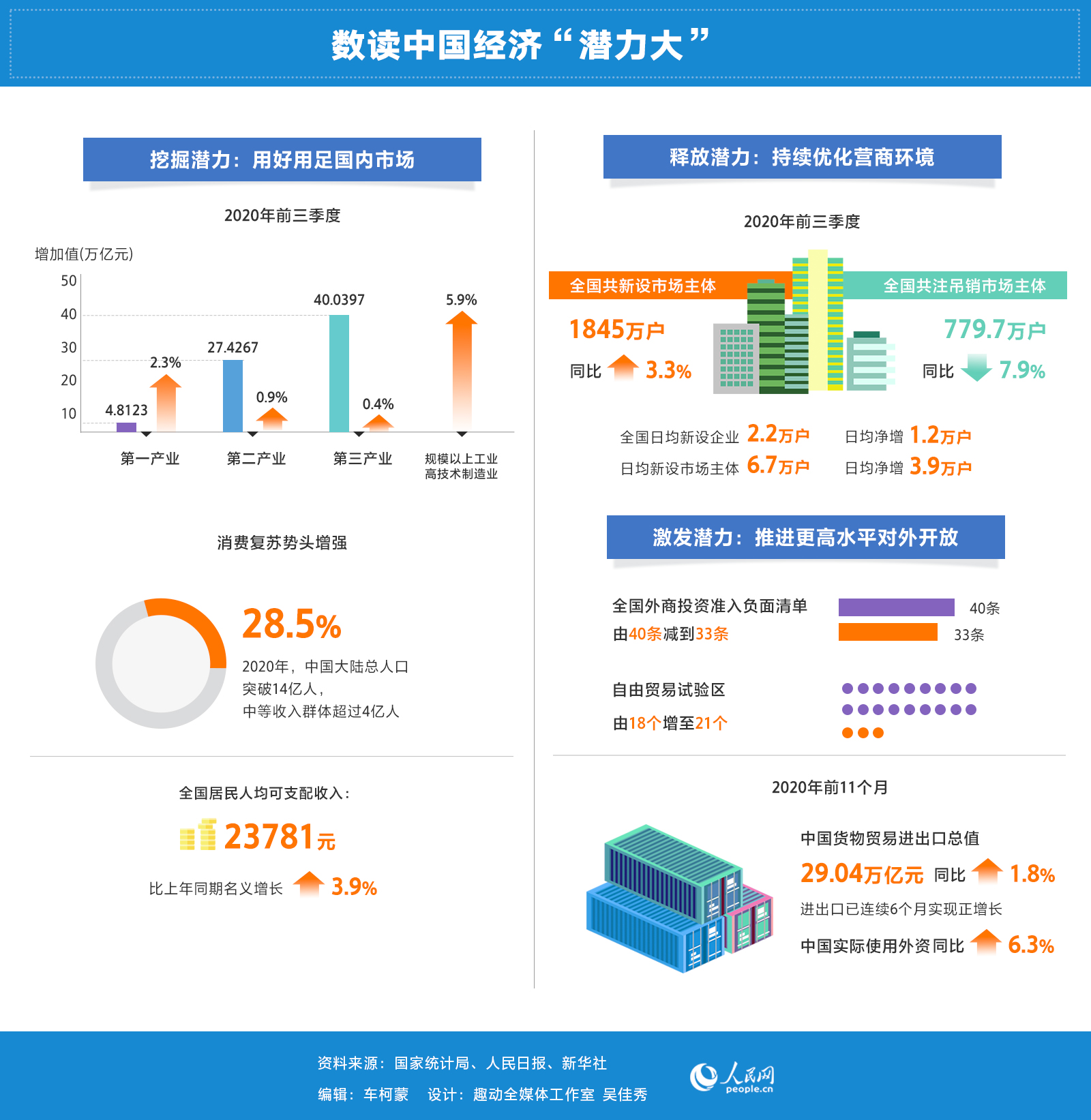
持续优化营商环境 在“放管服”改革中释放经济发展潜力
人民网 2021/01/27
安徽公布中药饮片检查信息 责令限期整改涉华润三九精华制药
中国经济网 2020/12/10
上海返沪人员最新规定你知道吗?可凭检测卡免费核检!
上海发布 2020/11/05
蒙牛和伊利的奶好吗?官方辟谣蒙牛伊利等左右国家标准
前瞻网 2020/07/20
第十七届内蒙古服装服饰艺术节在通辽市开幕
中国新闻网 2020/11/16
可恶的人贩子 中国每年到底有多少个孩子被拐卖?
搜狐网 2020/11/12
今年的毕业季注定不同以往 希望“后浪”们开启人生新阶段的大门
人民网-文化频道 2020/06/30
“国货当自强”逐渐渗入国人的日常消费 国潮之风从何而起?
中国新闻网 2020/06/24
